



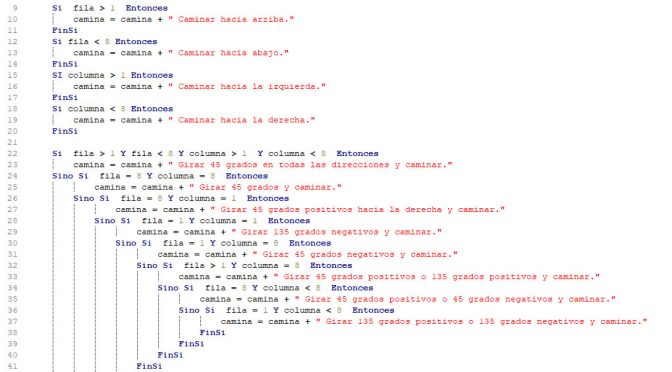
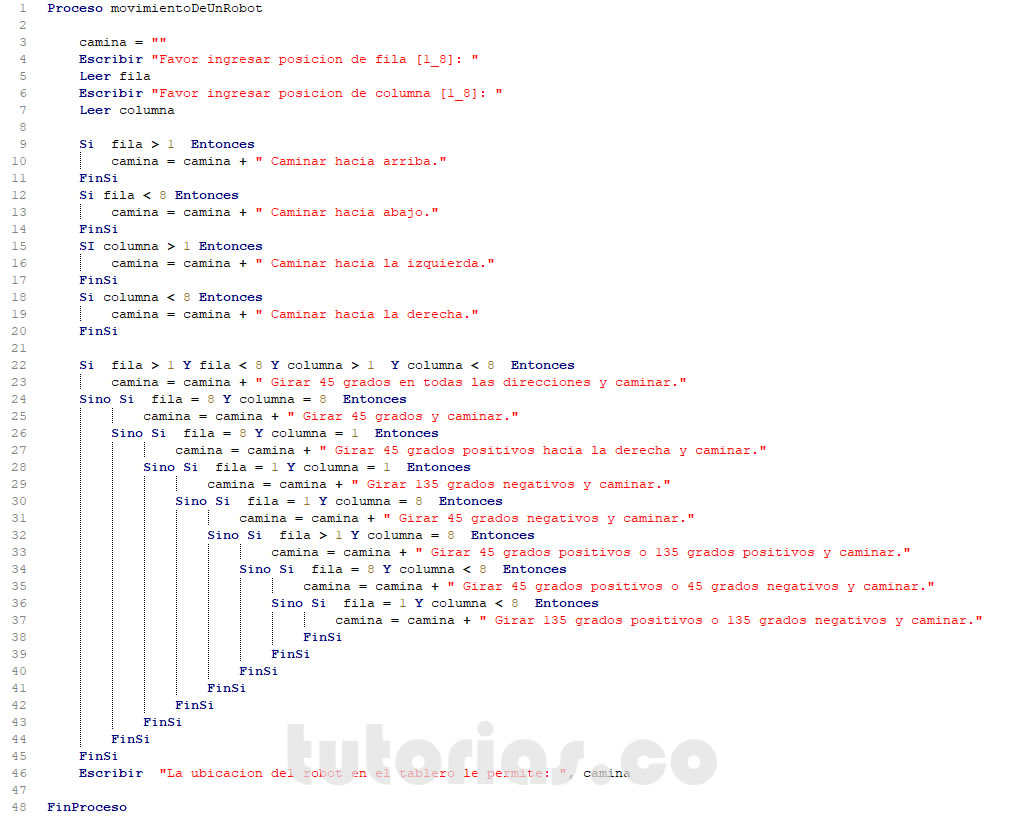
El problema planteado consiste en crear un programa que permita leer como datos de entrada las coordenadas de ubicación de un robot sobre un plano cartesiano de 8X8. Se debe imprimir hacia que lados se puede mover y caminar el robot teniendo en cuenta no sobrepasar el tablero o plano y además se permite al robot moverse en diagonales expresadas como rotación de 45 grados positivos o negativos o 135 grados positivos o negativos según su ubicación.
El siguiente algoritmo en pseint hace uso de sentencias condicionales simples y condicionales anidadas.
La lógica de este algoritmo en pseint es simple. Una vez se tienen las coordenadas del robot se programan los filtros básicos a través de sentencias condicionales.

Quiero hacer este programa… Pero ¿Cómo funciona?
La ejecución paso a paso del programa la puede ver en la


 eoria
eoria
Aclare algunos conceptos

est
Tómese únicamente 90 segundos

ablero
Comparte tu Algoritmo
Antes de implementar una condicional es importante entender la diferencia entre condicionales simples, compuestas o condicionales anidadas y aunque en algunos casos varios tipos de condicionales permitan dar solucion a un determinado problema, siempre debe existir una condicional mas eficiente.
[Tweet «»Las sentencias condicionales permiten tomar dos o más camin♥s alternativos en un programa #Tutorias» ☺»]
")
")
{kind=link}
{kind=link}